 ɨһɨ���ֻ����
ɨһɨ���ֻ����

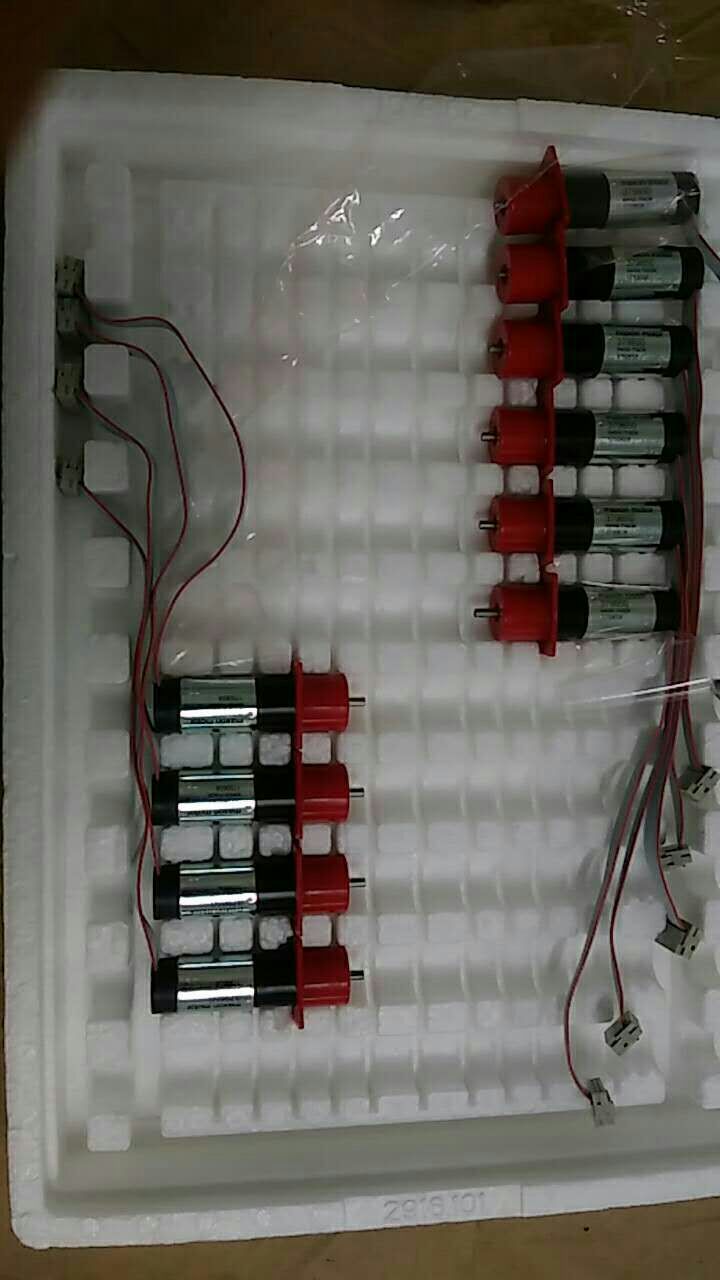






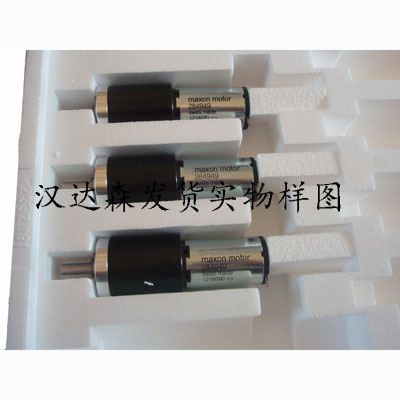
- Maxon motor������ �ŷ���� ���ڴ����ֻ�
��ϸ��Ϣ
Ʒ����Maxon motor �ӹ��������� �ͺ���218918 �������160 KW ���ѹ��1870 V �ת����50 rpm ��Ʒ������56 ���γߴ���0456 Ч����0456 �ٶ���ӦƵ����01560 Maxon motor������ �ŷ���� ���ڴ����ֻ�


MAXON DC MOTOR 47.040.038-00.08-050
MAXON DC MOTOR 41.040.038-00.00-140 30:1
MAXON DC MOTOR 41.040.038.00.00-148 2140-30 2938.803-0030.0.00
MAXON DC MOTOR 41.022.024-00.00-164 2924.814-0020.0-000
MAXON DC MOTOR 2924.814-0020.0-000
MAXON DC MOTOR 41.022.022-00.00-345 GP022A030-0019B1A004
MAXON DC MOTOR 41.026.026-00.00-324 30:1
MAXON DC MOTOR 41.022.022-00.00-902
MAXON DC MOTOR 41.022.022-00.00-202
MAXON DC MOTOR 47.022.022-00.19-312 3419.061/04
MAXON DC MOTOR 41.026.026-00.00-398 2326.939-12.216-200 88855 01377 1193:1 20/95 180Ncm
MAXON DC MOTOR 2326.945-14.111-050 30:1
����Aldebaran��˾ϣ��������һ�ֻ�����������������������,������Ϊ���ǵ����ѡ�Romeo�����˵��з��������Ŀ����������Ҫһ����
�÷��˻�����һ��������39��maxon�����ֱ��������������������о����ǻ����������ڵij��ڽ�,Aldebaran��˾��û��ͣ��ǰ���IJ������ù�˾����Ϊ������������Ϊ��������������������ֻ�֮�����һ����ҵ������
Maxon����㷺Ӧ��������ҵ����������ҵ��maxon��˾ϣ�����δ������������Ӧ�õĵ����
�����˶����о�����������Ƽ���չ�ṩ�˷ḻ�������Դ������ı����ܹ��ṩһϵ�и��ӵ��˶����,�漰�����ڲ����˶����Ķ����ԵĽṹ����ˮ����������õĶ���;���˶�ģʽ��
Maxon�����ˮ�»�����,ˮ�»������ܳ�ɫ����ɺ���̽���������ҪӦ��ǰ�����������ھ��л�����ǿ�����ܻ��ߡ���Ӧ��ǿ�Ͱ�ȫ�Ժõ�����,���ܻ������Ѿ���Ϊ���ˮ���������Ҫ���ߡ�
������ѧ���о�����,�����ζ����漰���н��ɵĻ�����ڼ����������ģʽ��������������,�䱾���Ͽ��Կ�����һ������������Ԫ������ǿ�������,�ܹ���û�ж����н��ɵ����������²����н��ɵ������
MAXOM��˾�����������ӱ��˫β����������,�ڱ��ֿ����ζ�������֮��,��������˵�β����������ǰ��ʱ����ҡ�εıˡ�
��1���������о��ص���Ҫ������CPG��������ʵ������ֻ���������ƽ������,�����ڵڶ���˫β����������ص������ڽ���һ���ɿ���Ч��ˮ����ѧ��ģ����Ҫ�о����ݼ��ɹ�������ʾ:
(1)˫β���������ϵͳ��ơ��ڽ�϶�ʸ���ƽ���������˫β���Ļ�����,����˵�1��˫β��������DualFish-��,�俿ǰ��������������ǰ�����˼�������������,��β���������Ѳ�������1�������㲻ͬ,�ڶ���������DualFish-����õ�һ����Maxon�����������β���ܹ���ȷͬ������ڶ�,ʵ��*��Ƶ���ܹ��ﵽ6Hz,�������Ҫ��
(2)CPG��������Ľ�������ԭʼ����Ԫ���̿�ʼ,��ϸ���Ƶ���CPG��������ģ�͵Ĺ���,����ϵ�1��˫β��������DualFish-I���˶�����,��������֮��ƥ�����������,*��ȡ�ĺ����������ģ����ת��Ϊ����ֵ,���ݸ�CPG���������еķ�������,����ʵ�ֻ������ڴ�ֱ����������Ϲ��ܡ�
(3)ˮ����ѧ��ģ���Ը��Էֶ�����Ϊ����,�����ճ�Ժ���ѹ���Ե���̬�ļ���,�Ը��Ժ����Ե�β�������˳�ֵ����۽�ģ,�����������β�������ɰڶ������ڵ��ƽ�����
(4)˫β��������Ļ������ܼ��ƽ�����ʵ����ԡ���˫β��������DualFish-���DualFish-��Ϊʵ�����,��չ�˸��ֻ�������(ǰ�����ˡ��ϸ���DZ������ת���ǰ��շ���)����ʵ���Լ������ƽ�����ʵ��,��ѡ�ý�С���ʵĶ�������,��1����������зdz���ɫ�ĸ�������,ʹ��˫β���ڶ��ƽ���*���ٶ��ܹ��ﵽ0.54 m/s,Լ1.21BL/s,���������ƽ����ﵽ��*��Ѳ���ٶȿɴ�0.35m/s,Լ0.8BL/s���ڶ���˫β����������нϸߵļ�������,*����ٶ�Լ�ܴﵽ0.7m/s2,ͬʱDualFish-���зdz��õ�Ѳ���ٶ�,*���ٶ��ܴﵽ0.7m/s,Լ1.59BL/s
Maxon motor������ �ŷ���� ���ڴ����ֻ� -
��Ӧ�̵����������Ϣ
�鿴����





-
��Ʒ����
�� ��
-
��Ʒ����
-
elma��������ϴ��
-
���ʯ����
-
���Ա���
-
ģ�»�����ˮ����ѹ�ӻ�
-
��������ٻ�
-
��Դģ�顢�����
-
��������ķ�����������
-
�����������ס���������������
-
���� ����ŷ�
-
���ݡ�����
-
��Դ�����
-
̽ͷ
-
���������¿�������ѹ������
-
�á���ѹ�á���ѹ�á�Һѹ��
-
���졢���
-
������
-
�̵���
-
������
-
������
-
���졢��ǹ�����͡�������֬
-
�綯��
-
��Ƶ������������ִ����
-
���ٻ���ǧ�ﶥ
-
�ܷ�Ȧ
-
������
-
��Ե����
-
����������о
-
��ͷ
-
ѹ�����ء���ѹ���ء���λ����
-
Һѹ��ĸ������ۡ��ǽ���
-
�ƶ�������ȫ��
-
װ����
-
��ֱ�������ƻ���ѹ�ӻ�
-
ˮƽ��
-
����ƽ̨
-
����������
-
ĥ��
-
���� �ʳ� ��������
-
��Ե������
-
����Ԫ��
-
��ϵͳ����
-
������
-
Ƥ�������ʹ�
-
������������������������ϵͳ
-
����������/Һλ����
-
ʵ��������
-
-
��Ӧ��Ʒ
-

Elma�¹�ԭ������ҽ�ƹ�ѧ��ҵEasy 50R -

Schubert & Salzer����ֱ�ɵ綯��������������4030 -

Schubert & Salzer7010�¹����������Ƿ���ȫ�ɿ� -

Elbe Holding�¹�����������������������ҵ0.200 -

Elbe Holdingԭ��������������ڸ��ºͳ�ʪ����0.100 -

AQ��̬�����������ҽҩ��ҵDM50 -

ElmaDry TD 300�¹�ԭװ�����Ӧ����ʵ���� -

ElmaDry TD 30ԭ��ֱ�ɸ���װ�������������� -

ElmaEasy 300H27.5L������������ϴ���¹�ԭ�� -

ElmaEasy 180H�¹�ԭ������ҽ�ƹ�ѧ��ҵ -

Elma12.9L������������������ϴ��Easy 120H -

ElmaEasy 100Hԭ��ֱ�ɺ��շ��� -

ElmaEasy 60H����;��������ϴ���¹�ԭװ -

ElmaEasy 40H��������ϴ��Ӧ����ʵ����ҽ����ҵ -

ElmaEasy 30H��������ϴ������ϵ��ԭ��ֱ�� -

Elma��ϴ��ԭװ��������ҽ������Easy 30 -

Elma�й��������շ���ԭװ����Easy 20H -

Elma���ڳ�������ϴ�������ż�ϵ��Easy 20 -

Elma��ϴ��ԭװ����Ӧ����ʵ����Easy 10H -

KTRԭ�����������ڸ������̻�еұ����ҵRotex-stern14
-